
The evolution of 3D printing adds a new dimension: time. A breakthrough approach for intestinal ulcers
Intestinal ulcers are erosive lesions that cause a break in the continuity of the mucosa. Like any wound, the depth and severity of an ulcer can vary depending on the patient’s health and how quickly the problem can be treated. The most immediate remedy involves drugs and endoscopic therapies, but the effectiveness is influenced by the location of the ulcer. In fact, there are cases in which chronic ulcers can develop in locations that are difficult to reach endoscopically, such as the ileum and jejunum. In these cases, the only solution is still to undergo highly invasive treatments, such as surgery.
Solutions have been developed that aim to reduce the invasiveness of inspecting and treating hard-to-reach areas, such as endoscopic capsules and laparoscopic technologies. Although endoscopic capsules allow the intestine to be explored in a non-invasive and painless way, they do not allow treatment to be applied. Similarly, laparoscopic technologies reduce the invasiveness of the procedure but do not eliminate tissue trauma. A decisive step in this area would be the ability to reach the less accessible parts of the intestine in a completely non-invasive way, overcoming the limitations of traditional endoscopy. Another key advancement would be to integrate the release of a treatment capable of promoting ulcer repair into the same procedure.
Biomaterials for tissue reconstruction
Recent developments in 3D printing have led to the creation of scaffolds capable of inducing the regeneration of damaged tissues. These are structures, made of biomaterials arranged in an organized manner in space, capable of providing support for cell growth and tissue reconstruction. However, these scaffolds are designed as static structures, with a priori defined geometry and function, requiring direct placement on the injured site. So, their application is currently limited to surgical contexts, making them unsuitable for treating hard-to-reach injuries.
A promising solution that represents a step forward in this field is 4D printing. This technology evolves 3D printing by adding a new dimension: time. In fact, 4D-printed structures are not static. They can change shape in a programmed manner over time when exposed to external energy stimuli, such as heat, humidity, electric fields, or other environmental stimuli. The preparation is the same as for 3D printing, but the difference lies in the materials used. These are so-called smart materials, typically hydrogels or shape memory polymers. Thanks to their molecular and structural characteristics, they react to external factors by changing their conformation. The change can occur in the manufactured structure due to the intrinsic properties of the material it is made of. It can also result from the precise combination of different materials which, thanks to their complementary properties, give the structure the desired behavior.
Devices capable to transform
The possibility of developing devices capable of undergoing transformations has direct applications in the medical field and in minimally invasive applications. Programmable shape changes make it possible to develop smart components capable of deforming autonomously and adapting perfectly to the patient’s anatomy. Larger objects can now be printed in a smaller or more compact size, which will then expand spontaneously after receiving the stimulus. Based on this, our team, composed of researchers from the University of Pisa and the University of Perugia under the guidance of Prof. Valentini, and the University of Florence guided by Prof. Morabito and Prof. Rovero, has been working on the development of an ingestible capsule. This capsule is designed to respond to the need to treat bleeding ulcers located in areas that are difficult or impossible to reach with conventional endoscopy. It combines non-invasive transport with localized regenerative treatment.
Architecture and functional components of the ingestible capsule
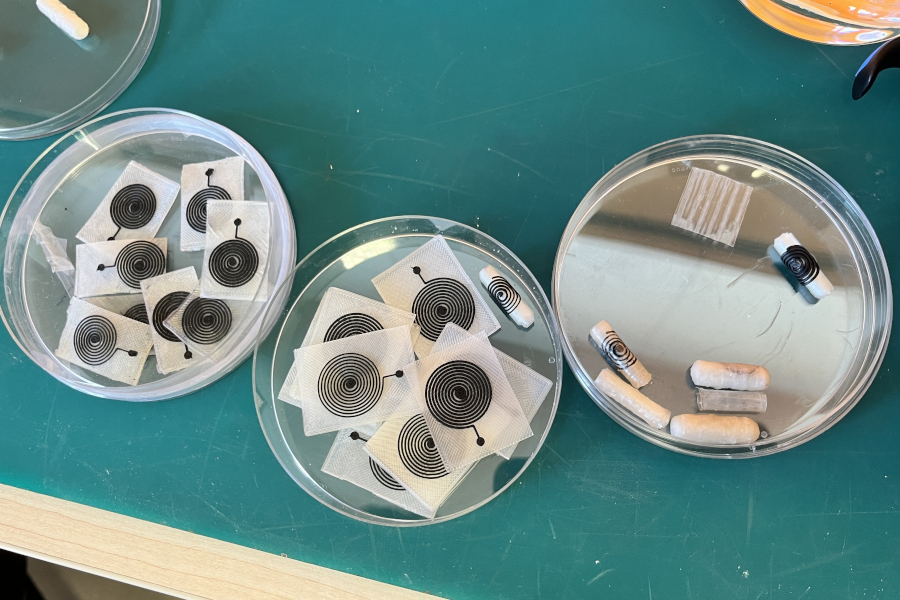
The capsule consists of several components, each with a specific function along the path from ingestion to release of the treatment in the intestine. Inside, there is a sacrificial PVA mandrel, which acts as temporary support during both manufacture and transport of the device. Once it reaches the intestinal environment, the mandrel gradually loses its consistency due to its biodegradability, allowing the system to be activated.
The central element is a 4D-printed scaffold, made directly on the sacrificial mandrel. The scaffold is designed to assume an initial tubular and compact configuration, compatible with ingestion. It automatically unfolds into a flat patch once it reaches a moist environment, such as the gastrointestinal tract. Externally, there is a gastroresistant coating, capable to resist more than two hours in acidic environments such as the stomach and degrading in a few minutes once it reaches the intestinal pH. Finally, there is an antenna made of conductive biomaterials, which provides information on the position of the capsule inside the patient.
Two opposite configurations
The functioning of the capsule meets a fundamental requirement. The scaffold must be able to exist in two functionally opposite configurations, one compact for transport and one expanded for treatment, and to switch autonomously from one to the other in response to the environment. In this context, 4D printing is the most effective approach, allowing complex and dynamic structures to be created over time through the combination of responsive materials and specially designed architectures.
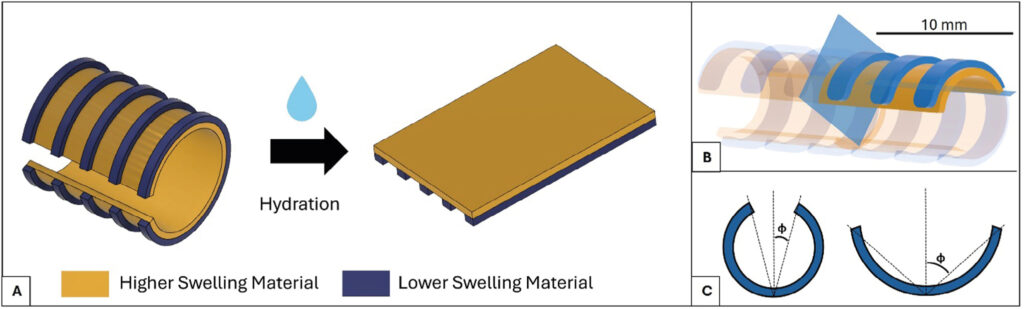
The initial shape of the structure is a semi-closed cylinder, which is why it is called c-shape. Then, when hydrated, the cylinder unfolds and becomes a flat sheet. This behavior is made possible both by the structural characteristics of the materials used and by the specific double-layer design.
The two layers are composed of gelatin-based hydrogel but have different swelling properties. The inner layer consists of a material with a higher gelatin concentration (10% w/v), contains silk fibroin (SF), and swells more when hydrated. The outer layer, on the other hand, has a design characterized by discrete lines and is made of a less concentrated gelatin-based material (5% w/v) with a lower swelling capacity. When the scaffold is exposed to an aqueous environment, it hydrates and expands. The differential swelling capacity between the two materials causes the outer layer to act as a constraint: its lines, expanding less than the inner layer, allow the movement of the structure to be directed.
Design optimisation, modelling and biocompatibility assessment
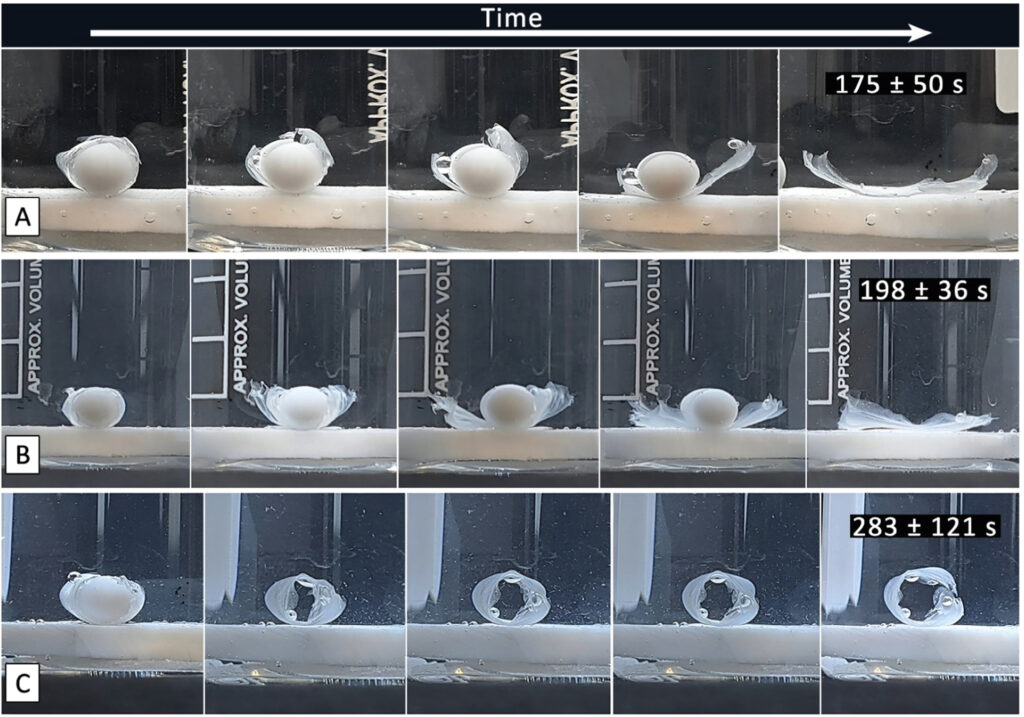
The size, thickness of the two layers, and number of lines in the outer layer are all parameters on which the unfolding behavior strongly depends. The best combination of parameters to ensure complete opening of the scaffold was obtained with finite element modeling (FEM). The use of FEM simulations in 4D printing is crucial for predicting how smart materials and structures will deform over time, integrating mechanical analysis with other dynamics of change such as, in this case, the hygroscopic swelling mechanism. The optimal configuration made it possible to obtain a structure capable of unfolding completely in 2-3 minutes, reaching a complete planar unfolding.
Finally, the choice of materials was also determined by biocompatibility. Gelatin is a natural polymer widely used in the manufacture of scaffolds and is enriched with SF, a protein derived from silk cocoons with excellent biological properties. SF improves cell adhesion and compatibility, making the scaffold a favorable environment for intestinal epithelial cells. To verify this, biological tests were carried out using two human colorectal cell lines (HT-29 and Caco-2). The results showed that the scaffold promotes cell adhesion, proliferation, and healthy morphology over time, confirming its suitability for tissue regeneration.
A novel 3D Printing pathway
A crucial aspect of the project was to identify a solution that would allow the capsule to be printed through a simple process that did not require manual manipulation or the use of support structures. Since these structures have a cylindrical geometry, a multiscale, multimaterial 3D printing platform was modified by introducing a rotating axis. The material can be printed directly on this axis, simplifying and speeding up its manufacture.
A non-planar cylindrical slicing algorithm was developed to plan this new printing approach. Unlike conventional planar slicing, which involves intersecting the .STL model with a series of horizontally overlapping planes, the cylindrical slicer allows the initial volume to be divided into concentric cylindrical layers defined around a rotating axis. This makes it easy to create complex tubular geometries without the need for support. The algorithm, developed entirely in Matlab® (The MathWorks Inc., United States), takes the .STL volume to be printed as input, together with the printing parameters used in traditional slicers (layer height, fill density, fill orientation), and returns a G-code for printer control.
Calculation of non-planar trajectories and manufacturing integration
How are non-planar trajectories calculated? The first step is to transform the volume from a cylindrical shape to a planar one by modifying its cylindrical coordinates (x, θ, r) to “unroll” it onto the plane. This creates an open volume that is incompatible with slicing operations, so a reconstruction phase is necessary to generate a closed, defect-free planar volume. The closed model is then sliced using a slicing algorithm for non-planar 3D printing applications. After slicing, the trajectories are “rewound” around the mandrel by converting the tool path data into angular commands for the rotating print axis. In addition to constant-radius cylindrical layers, the algorithm also supports trajectories for variable-radius cylindrical layers: this feature improves surface quality by minimizing the staircase effect and allows printing on complex rotating surfaces.
Single-step manufacturing and implications for regenerative devices
Thanks to these tools, it was possible to produce all components in a single manufacturing process, creating a complete and functional structure. This approach opens new avenues for regenerative therapies, where 4D printing plays a key role in the development of minimally invasive devices that can help repair injuries where conventional tools cannot intervene.
This work was funded by European Union – Next Generation EU – Mission 4 – Component 1. CUP I53D23002200006, under the project Prin 2022 Prometheus “4D printing self-deploying bioenabled polymer scaffolds for the non-invasive treatment of bleeding intestinal ulcers”, grant: 2022BZLTTK.
References:
- Chiesa, I., Ceccarini, M. R., Bittolo Bon, S., Codini, M., Beccari, T., Valentini, L., & De Maria, C. (2023). 4D printing shape-morphing hybrid biomaterials for advanced bioengineering applications. Materials, 16(20), 6661.
- Chiesa, I., Ceccarini, M. R., Guerra, A., Raffaele, G., Beati, L., Malaspina, R., Alunni Cardinali, M., Sassi, P., Valentini, L., & De Maria, C. (2025). 4D Printed Self‐Deploying Bio‐Based Scaffolds for the Regeneration of Endoluminal Tissue. Advanced Materials Technologies, 2402200.
- Chiesa, I., Esposito, A., Vozzi, G., Gottardi, R., & De Maria, C. (2025). 4D Bioprinted Self‐Folding Scaffolds Enhance Cartilage Formation in the Engineering of Trachea. Advanced Materials Technologies, 10(6), 2401210.
- Guerra, A., Fortunato, G. M., Bonatti, A. F., Vozzi, G., & De Maria, C. (2025). A cylindrical slicing algorithm for four-axis non-planar bioprinting of complex geometries. International Journal of Bioprinting, 11(2), 494–509.



{kind=link}